
Пекинский технологический институт объявил о революционном прогрессе в сфере космической инженерии — новый метод роботизированной сборки спутников, который подражает движениям человеческой руки, предоставляя роботам беспрецедентную адаптивность и надежность. Этот прогресс может существенно трансформировать текущий подход к изготовлению и ремонту спутников на орбите Земли
Фото: pexels.com
Современная космическая промышленность все чаще обращается к роботизированным системам для уменьшения человеческого фактора в экстремальных условиях космического пространства. Однако, до сих пор существующие технологии контроля роботов сталкивались с многочисленными трудностями из-за динамичной и непредсказуемой природы космоса.
Открытие исследователей базируется на тщательном изучении и воспроизведении характеристик движения человеческих рук, особенно их способности к демпфированию и точному контролю, которые являются критически важными для выполнения сложных манипуляций в космическом вакууме.
Новаторский метод Пекинского технологического института черпает вдохновение в скелетно-мышечной системе человеческой руки, известной своей гибкостью в регулировании демпфирования для безопасного и стабильного выполнения задач.
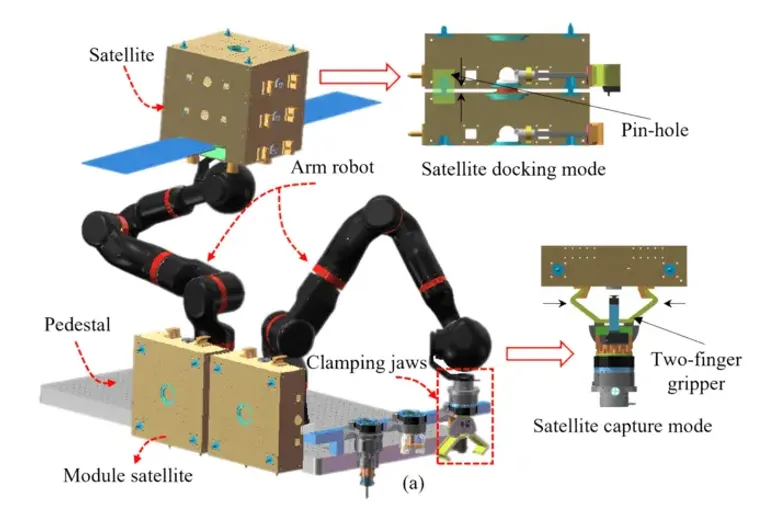
Платформа наземної перевірки супутника та процес складання / Фото Cyborg and Bionic Systems
Чтобы точно понять характеристики движений человеческой руки, исследователи использовали высокопроизводительное оборудование для измерения и анализа данных.
Система включает подсистему захвата движения и подсистему измерения контактной силы.
Датчик ATI omega160 6D фиксирует данные о контактной силе между человеческой рукой и компонентами сборки.
А данные о скорости руки получают с помощью мини-системы захвата движения Stereolabs ZED mini. Эти данные затем применяются к роботизированным манипуляторам, позволяя им имитировать движения человека.
Учитывая разнообразие задач и типов контактов при сборке спутников, исследовательская группа разделила процесс на три отдельных типа контактов, чтобы создать более точные модели для космической сборки с помощью роботов.
Интересное по теме: На Солнце из-за взрыва образовался гигантский каньон: как это повлияет на Землю
Ученые провели тщательное тестирование своей симуляции сборки космического спутника с помощью наземной экспериментальной платформы. Результаты эксперимента оказались многообещающими, подтвердив эффективность этого инновационного подхода в повышении адаптивности, точности и управляемости роботов, выполняющих задачи по сборке.
Пилотные тесты показали, что новая система способна не только точно копировать человеческие движения, но и адаптироваться к сложным условиям космической сборки, значительно повышая эффективность роботизированных манипуляторов. Это открывает двери в новую эру в космической индустрии, где роботизированные системы могут проводить сборку и ремонт спутников с точностью и гибкостью, сравнимой с человеческой.
Хотя эти выводы являются значительным шагом вперед, исследователи признают, что необходимы дальнейшие исследования. Их конечной целью является разработка роботов, способных выполнять гибкие задачи по сборке с человеческой ловкостью и эффективностью, выдерживая при этом сложные условия космического пространства.
Ознакомьтесь с другими популярными материалами:
NASA выпустила мобильное приложение: где скачать
NASA показало ультрафиолетовый снимок Юпитера
NASA нашло место на Марсе, где могут жить астронавты
Источник: EurekAlert






