
Пекінський технологічний інститут оголосив про революційний прогрес у сфері космічної інженерії – новий метод роботизованого складання супутників, який наслідує рухи людської руки, надаючи роботам безпрецедентну адаптивність та надійність. Цей прогрес може суттєво трансформувати поточний підхід до виготовлення та ремонту супутників на орбіті Землі.
Фото: pexels.com
Сучасна космічна промисловість все частіше звертається до роботизованих систем для зменшення людського фактору в екстремальних умовах космічного простору. Однак, досі існуючі технології контролю роботів стикалися з численними труднощами через динамічну і непередбачувану природу космосу.
Відкриття дослідників базується на ретельному вивченні та відтворенні характеристик руху людських рук, особливо їх здатності до демпфування і точного контролю, які є критично важливими для виконання складних маніпуляцій у космічному вакуумі.
Новаторський метод Пекінського технологічного інституту черпає натхнення в скелетно-м’язовій системі людської руки, відомій своєю гнучкістю в регулюванні демпфування для безпечного та стабільного виконання завдань.
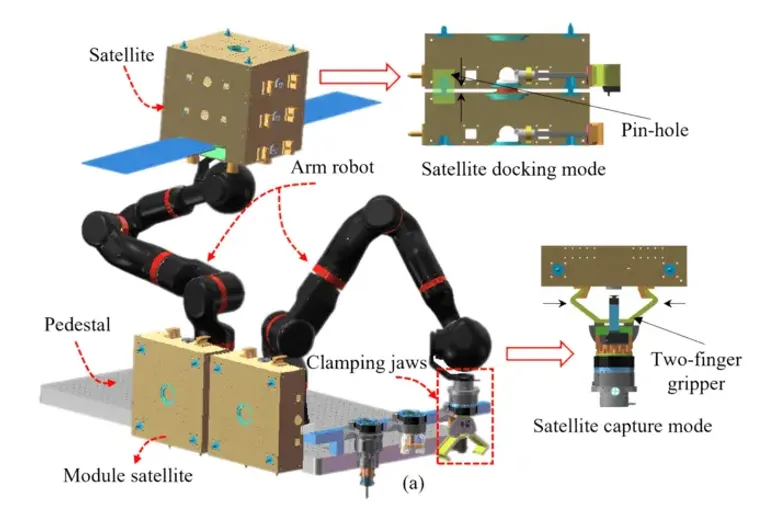
Платформа наземної перевірки супутника та процес складання / Фото Cyborg and Bionic Systems
Щоб точно зрозуміти характеристики рухів людської руки, дослідники використовували високопродуктивне обладнання для вимірювання та аналізу даних.
Система включає підсистему захоплення руху та підсистему вимірювання контактної сили.
Датчик ATI omega160 6D фіксує дані про контактну силу між людською рукою та компонентами збірки.
А дані про швидкість руки отримують за допомогою мінісистеми захоплення руху Stereolabs ZED mini. Ці дані потім застосовуються до роботизованих маніпуляторів, дозволяючи їм імітувати рухи людини.
Цікаве по темі: На Сонці через вибух утворився гіганський каньйон: як це вплине на Землю
Враховуючи різноманітність завдань і типів контактів при складанні супутників, дослідницька група розділила процес на три окремі типи контактів, щоб створити більш точні моделі для космічної збірки за допомогою роботів.
Науковці провели ретельне тестування своєї симуляції складання космічного супутника за допомогою наземної експериментальної платформи. Результати експерименту виявилися багатообіцяючими, підтвердивши ефективність цього інноваційного підходу в підвищенні адаптивності, точності та керованості роботів, які виконують завдання зі складання.
Пілотні тести показали, що нова система здатна не лише точно копіювати людські рухи, а й адаптуватися до складних умов космічної збірки, значно підвищуючи ефективність роботизованих маніпуляторів. Це відкриває двері до нової ери в космічній індустрії, де роботизовані системи можуть проводити складання та ремонт супутників з точністю та гнучкістю, порівнянною з людською.
Хоча ці висновки є значним кроком вперед, дослідники визнають, що необхідні подальші дослідження. Їхньою кінцевою метою є розробка роботів, здатних виконувати гнучкі завдання зі складання з людською спритністю та ефективністю, витримуючи при цьому складні умови космічного простору.
Ознайомтеся з іншими популярними матеріалами:
NASA випустила мобільний застосунок: де звантажити
NASA показало ультрафіолетовий знімок Юпітера
NASA знайшло місце на Марсі, де можуть жити астронавти
Джерело: EurekAlert















